<目次>
(1) ディープラーニングのパーセプトロンとは?Pythonで実装したサンプルもご紹介
(1-1) パーセプトロンとは?
(1-2) 処理の流れ
(1-3) サンプルプログラム
(1-4) 補足:Excelでの検算
(1) ディープラーニングのパーセプトロンとは?Pythonで実装したサンプルもご紹介
(1-1) パーセプトロンとは?
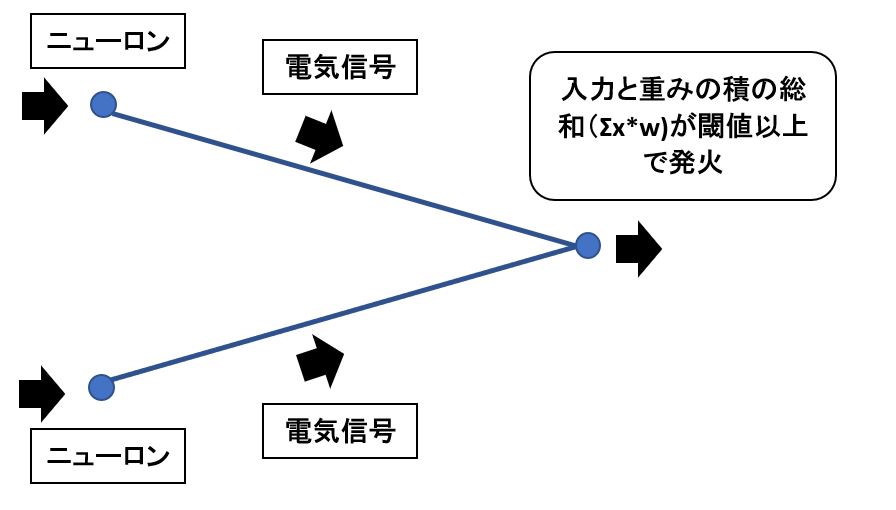
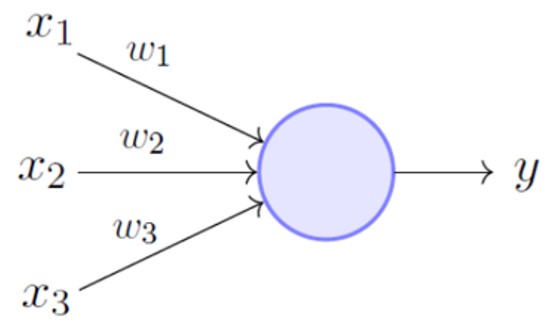
・論理ゲートでモデル化した回路を、入力がn個に拡張して一般化したものである。
・ニューロンが発火するかどうか?を判別するための関数を「ステップ関数」と呼ぶ。
→ f(x) = f(w1*x1+w2*x2+…+wn*xn-θ)で表され「0」or「1」の2値の出力になる
・ベクトルの内積で式を一般化したニューラルネットワークのモデルを「パーセプトロン」と呼ぶ
→ y=f([w転置ベクトル]・[xベクトル]+b)
・特に、入力した値がすぐに出力に伝播する、入力N:出力1のような形を「単純パーセプトロン」と呼ぶ
(図100)
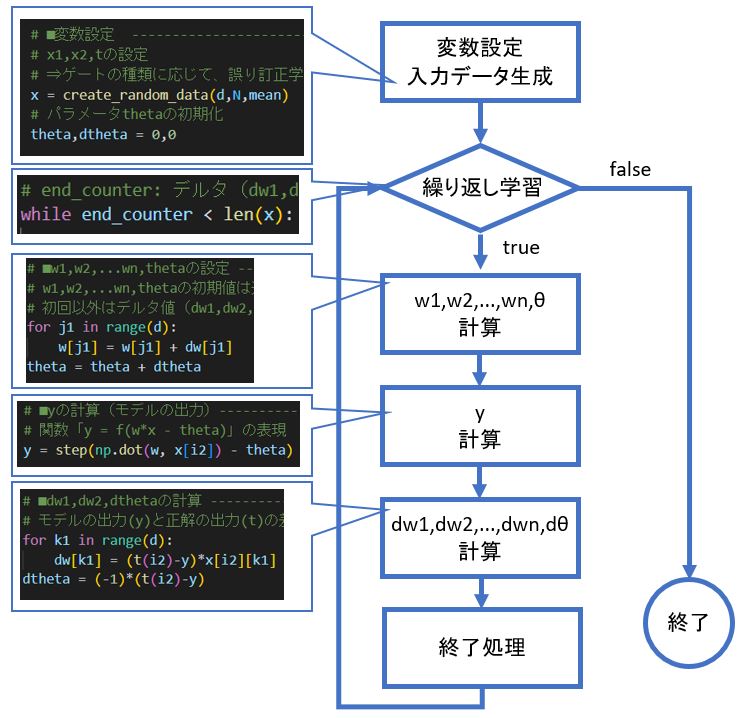
(1-2) 処理の流れ
(図121)
(1-3) サンプルプログラム
(サンプルプログラム)
import numpy as np
# グローバル変数
# d:データの次元
d = 2
# N:データ数(パターン別。発火有り/無しそれぞれN個)
N = 10
# 発火するニューロンの平均値
mean = 5
# パラメータwの初期化
# ⇒「np.zeros(n)」で0を要素とするn要素の配列を作成
w = np.zeros(d)
# dw1,dw2,...dwn,dthetaの定義
# ⇒ w1,w2,...wn,thetaの初期値は適当な値からスタート可。
dw = np.zeros(d)
# ランダムデータの生成(ただし、1パターンにデータ固定)
def create_random_data(d,N,mean):
rng = np.random.RandomState(123)
x1 = rng.randn(N,d) + np.array([0,0])
x2 = rng.randn(N,d) + np.array([mean,mean])
x = np.concatenate((x1,x2), axis=0)
return x
# ステップ関数
def step(x):
return 1 * (x >= 0)
# 正解値「t」の導出関数
# ⇒i:データの番号。0~N-1番目までは発火しない(0)データ。以降は発火する(1)データ。
def t(i):
if i < N:
return 0
else:
return 1
def main():
# ■変数設定 -------------------------------------------------------------
# x1,x2,tの設定
# ⇒ゲートの種類に応じて、誤り訂正学習法で使える「データ数回(今回は20))」のパターンを設定
x = create_random_data(d,N,mean)
# パラメータthetaの初期化
theta,dtheta = 0,0
# ■繰り返し学習処理 -------------------------------------------------------------
# dw1,dw2,...dwn,dthetaが「データ数回(今回は20)」連続で0になるまで繰り返し
# ⇒ゲートの「データ数回(今回は20))」個のパターン全部でデルタ=0なら収束と判断
# delta_zero_flag: 現在のデータ(x1,x2,...xn)に対してdw1,dw2,...dwn,dthetaが0か?の管理フラグ
delta_zero_flag = False
# i1: ループ回数、i2: 現在のデータ数(何番目のデータで計算中か)
i1,i2,end_counter = 0,0,0
# end_counter: デルタ(dw1,dw2,...dwn,dtheta)=ゼロがデータの個数(len(x))回続くまで
while end_counter < len(x):
# if: 初回は1番目のデータ(i2=0)
if i1 == 0: i2 = 0
# elif: 2回目以降でlen(x)-1の場合は、セットの最後のデータのため、0リセット
elif i2 != 0 and i2 == len(x)-1: i2 = 0
# else: 次のデータを使うためi2加算
else: i2 = i2 + 1
# ■w1,w2,...wn,thetaの設定 ------------------------------------------------
# w1,w2,...wn,thetaの初期値は適当な値からスタート可。
# 初回以外はデルタ値(dw1,dw2,...dwn,dtheta)を加算して更新
for j1 in range(d):
w[j1] = w[j1] + dw[j1]
theta = theta + dtheta
# ■yの計算(モデルの出力)--------------------------------------------------
# 関数「y = f(w*x - theta)」の表現
y = step(np.dot(w, x[i2]) - theta)
# ■dw1,dw2,dthetaの計算 --------------------------------------------------
# モデルの出力(y)と正解の出力(t)の差を用いて計算する。
for k1 in range(d):
dw[k1] = (t(i2)-y)*x[i2][k1]
dtheta = (-1)*(t(i2)-y)
# ■ループ脱出判定 ---------------------------------------------------------
# ゲートの「データ数回(今回は20)」パターン(x1,x2,...xn,tの組み合わせ)全てで
# 修正分(dw1,dw2,...xn,dtheta)が0になった場合に脱出する
# ------------------------------------------------------------------------
# (1)最初にFlagをTrueにしておく
delta_zero_flag = True
# (2)dw1,dw2,..dwnと確認し、1つでも0でないならフラグをFalseにする(処理を継続する)
for l1 in range(d):
if dw[l1] != 0:
delta_zero_flag = False
# (3)dthetaを確認し、0ならフラグをFalseにする
if dtheta != 0:
delta_zero_flag = False
# (4)上記で1セット分(dw1,dw2,...,dwn,dtheta)なので、
# この時点でdelta_zero_flag == Trueなら1回分のカウントする
if delta_zero_flag == True:
end_counter = end_counter + 1
# (5)ただし、最後のセットで、end_counter < [データ数]なら
# 全部が0でない(収束していない)として、end_counterをリセット
if i2 == len(x)-1 and end_counter < len(x):
end_counter = 0
print("k= ",i1,"x1 =",'{:.2f}'.format(x[i2][0]),"x2 =",'{:.2f}'.format(x[i2][1]),"t =",t(i2),"w1 =",'{:.2f}'.format(w[0]),"w2 =",'{:.2f}'.format(w[1]),"theta =",theta,"y =",'{:.2f}'.format(y),"dw1 =",'{:.2f}'.format(dw[0]),"dw2 =",'{:.2f}'.format(dw[1]),"dtheta =",dtheta,"end=",i2)
# ループ変数を更新
i1 = i1 + 1
if __name__ == "__main__":
main()
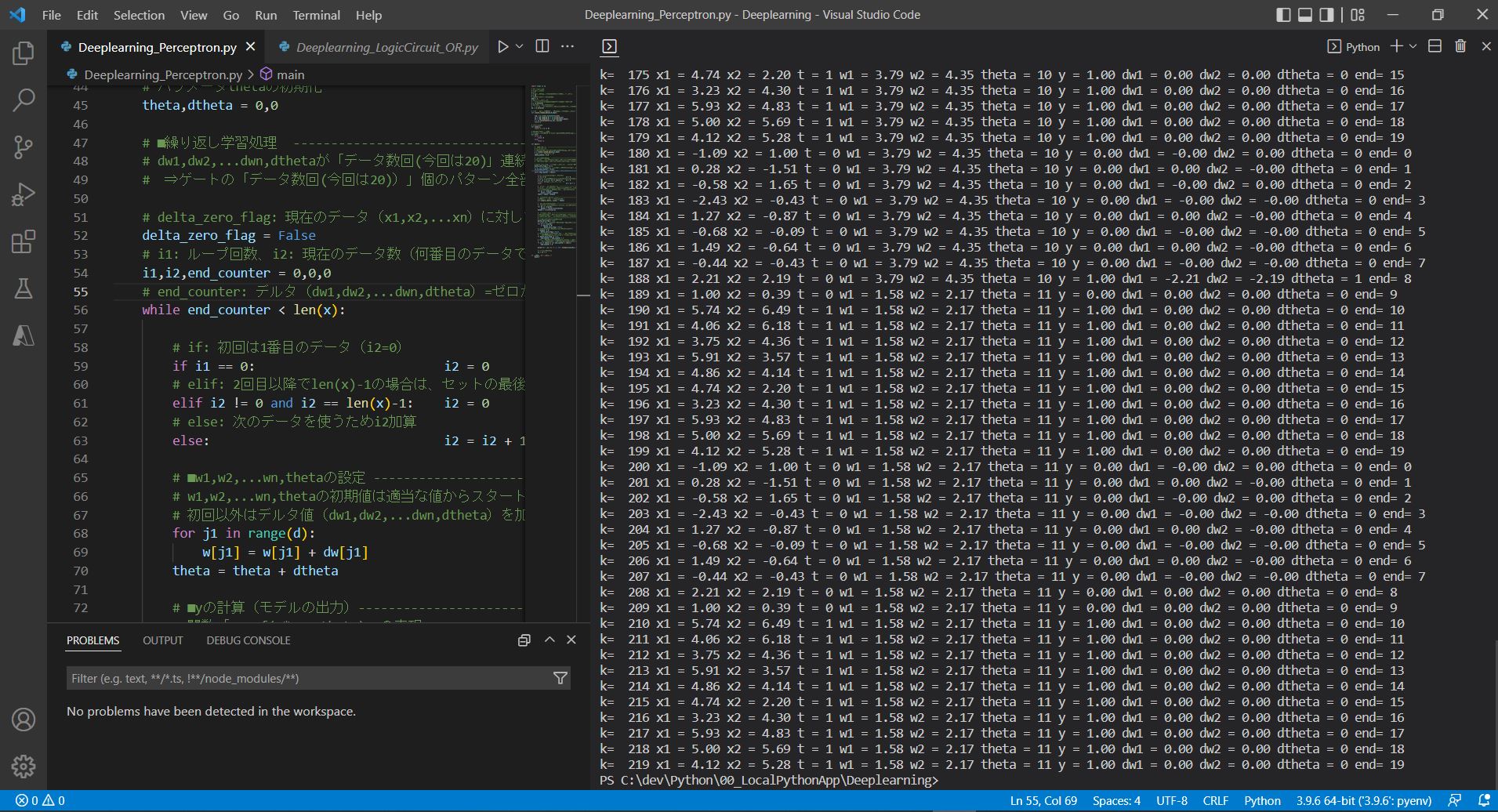
(実行結果例)
k= 0 x1 = -1.09 x2 = 1.00 t = 0 w1 = 0.00 w2 = 0.00 theta = 0 y = 1.00 dw1 = 1.09 dw2 = -1.00 dtheta = 1 end= 0 k= 1 x1 = 0.28 x2 = -1.51 t = 0 w1 = 1.09 w2 = -1.00 theta = 1 y = 1.00 dw1 = -0.28 dw2 = 1.51 dtheta = 1 end= 1 k= 2 x1 = -0.58 x2 = 1.65 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = -0.00 dw2 = 0.00 dtheta = 0 end= 2 k= 3 x1 = -2.43 x2 = -0.43 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 3 k= 4 x1 = 1.27 x2 = -0.87 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 4 k= 5 x1 = -0.68 x2 = -0.09 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 5 k= 6 x1 = 1.49 x2 = -0.64 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 6 k= 7 x1 = -0.44 x2 = -0.43 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 7 k= 8 x1 = 2.21 x2 = 2.19 t = 0 w1 = 0.80 w2 = 0.51 theta = 2 y = 1.00 dw1 = -2.21 dw2 = -2.19 dtheta = 1 end= 8 k= 9 x1 = 1.00 x2 = 0.39 t = 0 w1 = -1.40 w2 = -1.68 theta = 3 y = 0.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 9 k= 10 x1 = 5.74 x2 = 6.49 t = 1 w1 = -1.40 w2 = -1.68 theta = 3 y = 0.00 dw1 = 5.74 dw2 = 6.49 dtheta = -1 end= 10 k= 11 x1 = 4.06 x2 = 6.18 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 11 k= 12 x1 = 3.75 x2 = 4.36 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 12 k= 13 x1 = 5.91 x2 = 3.57 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 13 k= 14 x1 = 4.86 x2 = 4.14 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 14 k= 15 x1 = 4.74 x2 = 2.20 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 15 k= 16 x1 = 3.23 x2 = 4.30 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 16 k= 17 x1 = 5.93 x2 = 4.83 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 17 k= 18 x1 = 5.00 x2 = 5.69 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 18 k= 19 x1 = 4.12 x2 = 5.28 t = 1 w1 = 4.33 w2 = 4.81 theta = 2 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 19 ~中略~ k= 181 x1 = 0.28 x2 = -1.51 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 1 k= 182 x1 = -0.58 x2 = 1.65 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = -0.00 dw2 = 0.00 dtheta = 0 end= 2 k= 183 x1 = -2.43 x2 = -0.43 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 3 k= 184 x1 = 1.27 x2 = -0.87 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 4 k= 185 x1 = -0.68 x2 = -0.09 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 5 k= 186 x1 = 1.49 x2 = -0.64 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 6 k= 187 x1 = -0.44 x2 = -0.43 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 7 k= 188 x1 = 2.21 x2 = 2.19 t = 0 w1 = 3.79 w2 = 4.35 theta = 10 y = 1.00 dw1 = -2.21 dw2 = -2.19 dtheta = 1 end= 8 k= 189 x1 = 1.00 x2 = 0.39 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 9 k= 190 x1 = 5.74 x2 = 6.49 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 10 k= 191 x1 = 4.06 x2 = 6.18 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 11 k= 192 x1 = 3.75 x2 = 4.36 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 12 k= 193 x1 = 5.91 x2 = 3.57 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 13 k= 194 x1 = 4.86 x2 = 4.14 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 14 k= 195 x1 = 4.74 x2 = 2.20 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 15 k= 196 x1 = 3.23 x2 = 4.30 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 16 k= 197 x1 = 5.93 x2 = 4.83 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 17 k= 198 x1 = 5.00 x2 = 5.69 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 18 k= 199 x1 = 4.12 x2 = 5.28 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 19 k= 200 x1 = -1.09 x2 = 1.00 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = -0.00 dw2 = 0.00 dtheta = 0 end= 0 k= 201 x1 = 0.28 x2 = -1.51 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 1 k= 202 x1 = -0.58 x2 = 1.65 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = -0.00 dw2 = 0.00 dtheta = 0 end= 2 k= 203 x1 = -2.43 x2 = -0.43 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 3 k= 204 x1 = 1.27 x2 = -0.87 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 4 k= 205 x1 = -0.68 x2 = -0.09 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 5 k= 206 x1 = 1.49 x2 = -0.64 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = -0.00 dtheta = 0 end= 6 k= 207 x1 = -0.44 x2 = -0.43 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = -0.00 dw2 = -0.00 dtheta = 0 end= 7 k= 208 x1 = 2.21 x2 = 2.19 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 8 k= 209 x1 = 1.00 x2 = 0.39 t = 0 w1 = 1.58 w2 = 2.17 theta = 11 y = 0.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 9 k= 210 x1 = 5.74 x2 = 6.49 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 10 k= 211 x1 = 4.06 x2 = 6.18 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 11 k= 212 x1 = 3.75 x2 = 4.36 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 12 k= 213 x1 = 5.91 x2 = 3.57 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 13 k= 214 x1 = 4.86 x2 = 4.14 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 14 k= 215 x1 = 4.74 x2 = 2.20 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 15 k= 216 x1 = 3.23 x2 = 4.30 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 16 k= 217 x1 = 5.93 x2 = 4.83 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 17 k= 218 x1 = 5.00 x2 = 5.69 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 18 k= 219 x1 = 4.12 x2 = 5.28 t = 1 w1 = 1.58 w2 = 2.17 theta = 11 y = 1.00 dw1 = 0.00 dw2 = 0.00 dtheta = 0 end= 19
(図131)
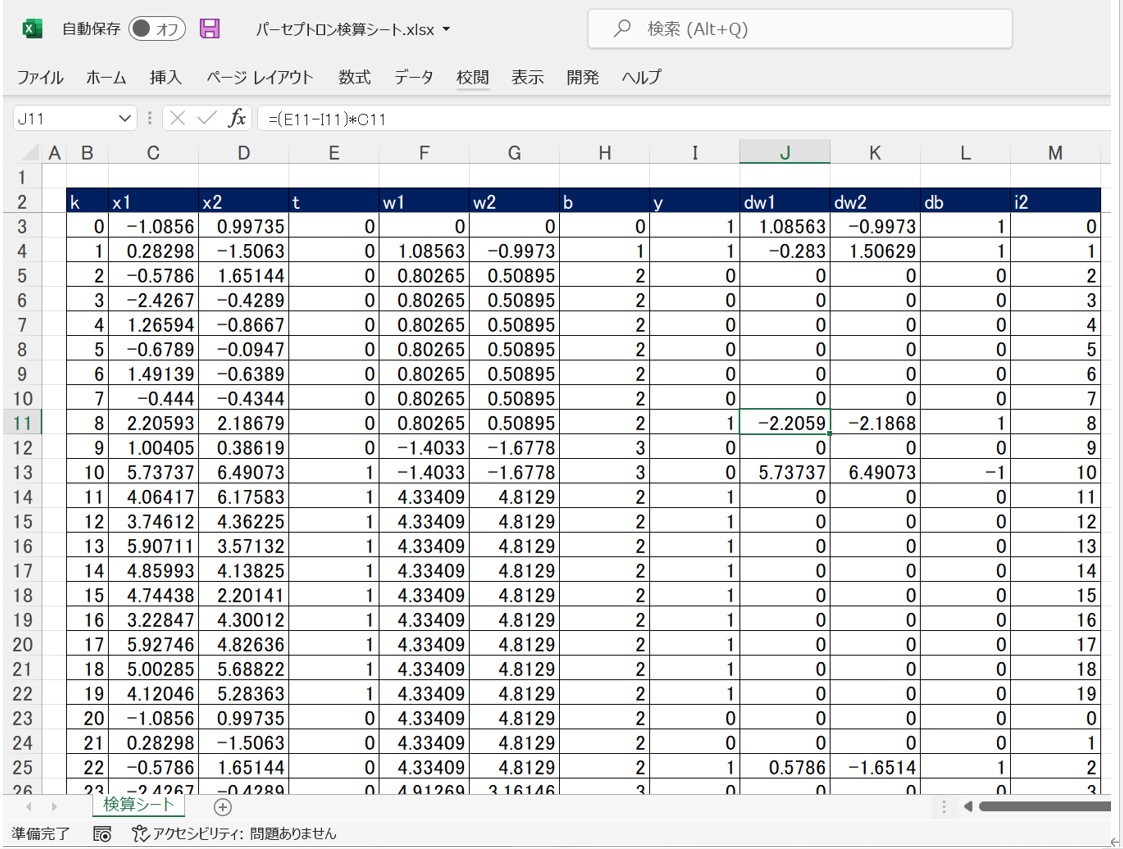
(1-4) 補足:Excelでの検算
プログラムの計算をチェックするため、Excelによる検算も実施したので、参考までにシートを添付します。
(図141)